何をお探しですか?
自動運転エミュレーション
実環境下での自動運転技術のテストをラボに持ち込む



自動運転車の実環境下テスト
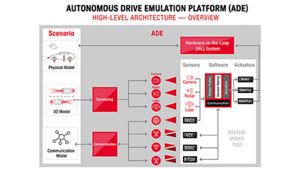
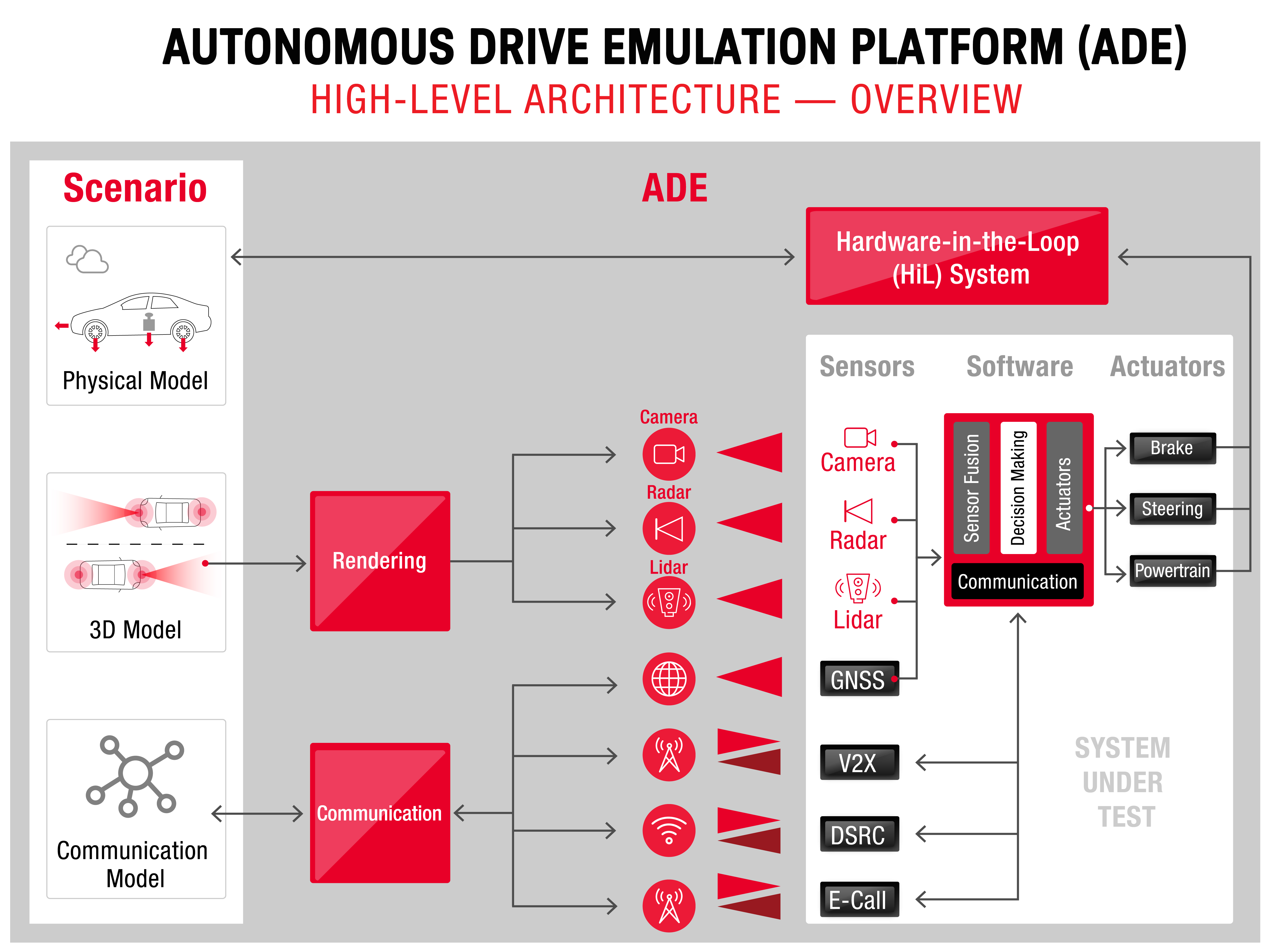
自動運転業界は複数の技術的な混乱に直面しています。 先進運転支援システム(ADAS)を搭載した自動車では、意思決定ユニットは増加した多数のセンサからの大量のデータを処理する必要があり、その結果、開発、シミュレーション、テストが大幅に複雑化しています。 キーサイトは実環境下で機能する完全な自動運転車を実現するために、これらの難題を克服するために取り組んでいます。 キーサイトの自動運転エミュレーションプラットフォームは、ありふれたものから100万分の1までの現実的な道路シナリオを使ってラボ内でテストを行うための環境エミュレーターです。 トータル・シーン・ジェネレーターを使い、このプラットフォームが実際のセンサに時間同期した入力を使用して、ADASソフトウェアを実行します。
多面的な環境エミュレーションによるトータルな道路シーンの生成
キーサイトの自動運転エミュレーション(ADE)プラットフォームは、ありふれたものから100万分の1までの現実的な道路シナリオに対してラボ内でテストを行うための環境エミュレーターです。 トータル・シーン・ジェネレーターを使い、このプラットフォームが実際のセンサに時間同期した入力を使用して、ADASソフトウェアを実行します。
詳細は、新しいC-V2X自動運転エミュレーションソリューションとレーダー・シーン・エミュレーターをご参照ください。

キーサイトの自動運転エミュレーションでADASの信頼を構築
自動運転車の開発において、ADASの安全性への信頼は詳細なテストの上に成り立っています。 これには、コーナーケースの調査と新しい設計の認定に焦点を当てた、実際あるいはシミュレーションでの数億マイルもの路上テストが必要です。
キーサイトのADEプラットフォームは、センサ、無線リンク、ECUおよびAIアルゴリズムの詳細なシミュレーションや時間同期テストを使用してそのプロセスを加速します。 最先端のリアリズムを備えたADEプラットフォームにより、開発者はデザインを徹底的にテストし、システム動作のデバッグと微調整にフォーカスすることができます。
紹介ビデオをご覧いただき、ADEがモビリティのビジョンの実現にどのように役立つかご覧ください。
This is a modal window.
ADEプラットフォームで道路をラボに持ち込む
車の運転中に多くの判断をすることや、よい運転ができるようになるまでにかかった時間を考えてみてください。 それこそが課題です:ヒトによる最高の運転能力を超える複雑なシステムを構築することです。 自動車メーカーがレベル4/5の自動運転車の実現を目指す中で、ADAS機能の特徴はパーキングアシストや自動ブレーキにとどまりません。 それらを判断するアルゴリズムは、これまで以上に多くのコーナーケース、道路、市街地について「学習」しなければなりません。 実証されていないシステムで、早い段階で実施するにはリスクが高すぎます。 最適な代替案とは、ソフトウェアシミュレーションと路上試験とのギャップを埋めるソリューションです。 実際のセンサーやECUコード、AIロジックなどを検証できる、実環境のシナリオをエミュレートする必要があります。 より多くのシナリオを、より早くテストすることで、いつ止めるべきか、いつ自信を持ってサインオフすべきか、判断がより明確になります。
- モデル化されたオブジェクトの非常に現実的なビューでカメラやレーダーのテストを強化
- 最先端のレーダー・ターゲット・シミュレーション機能を活用
- C-V2X(Cellular Vehicle-to-Everything)シナリオのアプリケーションレベルのテストを組み込む
確かな信頼性で新しい機能をサインオフ
ADEプラットフォームは、車両に使用する実際のADASセンサを直接刺激する「トータル・シーン・ジェネレーション」を使用する「環境エミュレーター」です。 カメラ、レーダー、C-V2Xなどの見通しシステムと通信型システムの両方に対応する機能 オープンアーキテクチャーなので、既存のハードウェア・イン・ザ・ループ(HIL)システムや3Dモデラーによってループを閉じることもできます。 これらの機能はきっと、ソフトウェアシミュレーションと路上試験とのギャップを埋めるソリューションになることでしょう。
- ADAS機能のソフトウェアシミュレーションと路上試験の間のギャップを埋める
- 開発サイクルのより早い段階で、さらに詳細なADASソフトウェアの解析を実行
- SOP後にリリースされる機能およびアップデートの一貫性のあるテストを保証
- オープンなADEアーキテクチャーにより、HiLシステムおよび3Dモデラーへの投資を保護
- センサシステムやテスト要件の進化に合わせて、自動運転エミュレーションソリューションを成長
最適なツールを使用して機能を拡張する
ADAS/AVサブシステムの機能および性能テストは、検証の一環に過ぎません。 キーサイトの既存製品のいずれか(すべて)を使用して、EOLテストとともに研究開発のデザイン検証のニーズに対応します。










注目のリソース







{kind=link}
ご要望、ご質問はございませんか。