何をお探しですか?
AD1012Aレーダー・シーン・エミュレーター

ラボでのフルシーンエミュレーションでレーダー自動運転機能を検証
スタート価格:
ハイライト
レーダー・シーン・エミュレーターでレーダーベース自動運転機能をテスト
自動運転を次のレベルに進めるためには、車載センサから検知されたレーダー反射を解釈するように訓練された信頼性の高いアルゴリズムが必要です。 キーサイトの業界初の技術は、何百ものミニチュアレーダー・ターゲット・シミュレータを組み合わせて、最大512ピクセルの解像度のオブジェクトを、1.5 メートルの至近距離でエミュレーションを可能にするスケーラブルなスクリーンにしています。 この画期的なレーダー・シーン・エミュレーション・ソリューションにより、制限のある視野角(FOV)で4メール未満の距離でオブジェクトをシミュレートできない従来のレーダー・センサー・テスト・ソリューションを解決します。
「トータル・シーン・ジェネレーション」を使用することにより、レーダー・シーン・エミュレーション・ソリューションで実際のセンサーに時間的に同期した入力を適用することで、自動運転システムとアルゴリズムを演習します。 オープンアーキテクチャーなので、既存のハードウェア・イン・ザ・ループ(HIL)システムや3Dモデラーによってループを閉じることもできます。 これらの機能はきっと、ソフトウェアシミュレーションと路上試験とのギャップを埋めるソリューションになることでしょう。 そのため、実際のレーダーセンサーの反応をテストしないソフトウェアシミュレーションの限界の問題を解決すると同時に、テストトラックではできない、レーダーシーンの再現性があるテストを実現します。
レーダー・シーン・エミュレーターは、隣接した視野角で、さまざまな速度、距離、ターゲット数など、実環境の運転シナリオをエミュレートすることを可能にします。 複雑な実環境の運転シナリオに対して信頼性のあるテストをしたレーダーセンサとバックエンドソフトウェアを使用すれば、ADASと次世代自動車の自律化のビジョンをより早く、少ないリスクで実現できます。
ラボのフル・レーダー・シーン・エミュレーション
- 最大512ピクセルの解像度を持つレーダーセンサーとシステムの徹底演習 水平軸±70度、垂直軸±15度
- FOV 1.5 m~300 mの範囲、0~400 km/hの速度で静的および動的ターゲットを生成することにより、短距離、中距離、長距離のミリ波レーダーをサポート
- 機械的に固定されたRFフロントエンドで、マルチターゲット、マルチアングルのシナリオに対応し、再現性がある到着角(AOA)確度を提供
- 複雑で、RF密度の高い都市部のシーンを実際的な干渉テストでエミュレート
- 3Dポイントクラウドと多重反射を使用することで、オブジェクトの検出と区別が向上
レーダー・シーン・エミュレーターを支える技術
革新的な技術でレーダー・シーン・エミュレーターを実現 キーサイトラボとパートナーであるIPG Automotive社の自動車テストのエキスパートから聞いた、この画期的な技術を可能にした技術の仕組みについてご紹介します。20個から40個を少し超えるくらいのレーダーオブジェクトから、512個をサポートするよう急速に進化した方法について説明します。
- Video Player is loading.
This is a modal window.
The media could not be loaded, either because the server or network failed or because the format is not supported.当社は、自動車テスト・コミュニティの皆様に、キーサイトの新型AD1012A レーダー・シーン・エミュレーターの画期的な技術発表会にご招待します。
キーサイトの業界初のレーダー・シーン・エミュレータ技術は、完全な車両の自立化を達成するのに必要な堅牢で高度な運転手支援システム(ADAS)レーダーセンサーとアルゴリズムの開発をお手伝いします。
詳細については、キーサイトのレーダー・シーン・エミュレーターのバーチャル発表会にご参加ください。
このデモでは、レーダー・シーン・エミュレーターがフルシーンのエミュレーションを使いADASレーダーのビジョンをどのように鮮明にするかをご紹介します。
- 近距離と遠距離の両方のターゲットを検知するために、+ / -70°の広い視野(FOV)でテスト。
- 環境条件、交通密度、速度、距離、ターゲットの総数を変化させたテストシナリオを適用。
- ADAS / AVアルゴリズムのトレーニングを加速し、複雑な再現性のあるシーンでのテストシナリオを早期に実施。
また、IPG社のシミュレーション技術とキーサイトのレーダー・シーン・エミュレーターとの連携により、ADASとAVアルゴリズムのトレーニングを革新的な手法で実現する方法も説明いたします。



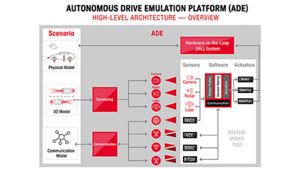
こちらのデモでは、レーダー・シーン・エミュレーションの技術が、いかにキーサイトの自動運転エミュレーションプラットフォームの中核となっているかをご紹介します。 詳細はこちら:
- キーサイトの革新的な小型レーダー・ターゲット・シミュレーターは、テストのパラダイムをオブジェクト検出から交通シーンのエミュレーションへとシフトさせます。
- レーダー・シーン・エミュレーター、無線見通し外センサー、時間同期ソフトウェアが連携して実験ラボ内でテストを行います。
- ハードウェア・イン・ザ・ループ(HIL)システムは、すべての関連する車載ADASセンサーと同期接続してエミュレートを行います。
受賞したキーサイトのレーダー・シーン・エミュレータ®
- AutoSens Awards 2022 – Silver Winner: Best Validation/Simulation Tool
- The Electronics Industry Awards 2022: Automotive Product of the Year – 高評価

主な仕様
レーダー・シーン・エミュレーターの機能を拡張
レーダー・シーン・エミュレーターでナレッジを増やす









関連するキーサイトの自動運転ソリューション


ご要望、ご質問はございませんか。